|
Rleg
2
|
|
Rleg
2
|
#include "control.h"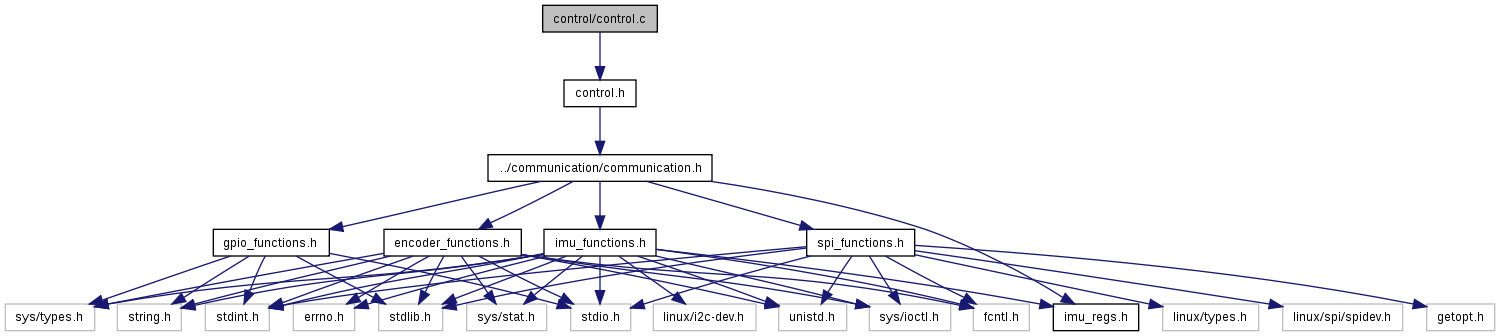
Go to the source code of this file.
Functions | |
| void | control_test (double time_global, IMU_DATA_STRUCT *imu_data, MRA_DATA_STRUCT *mra_data, ENC_DATA_STRUCT *enc_data) |
| Function: control_main Summary: Calculate the control signal. More... | |
| void control_test | ( | double | time_global, |
| IMU_DATA_STRUCT * | imu_data, | ||
| MRA_DATA_STRUCT * | mra_data, | ||
| ENC_DATA_STRUCT * | enc_data | ||
| ) |
Function: control_main Summary: Calculate the control signal.
| t_task_1_global | containing the ... |
| imu_data | containing data from accelerometer, gyrometer and magnetometer |
| eff_data | containing data from load cell |
| mra_data | struct containing the control signal |
void control_main (double time_global, IMU_DATA_STRUCT *imu_data, MRA_DATA_STRUCT *mra_data , ENC_DATA_STRUCT *enc_data){ int t_gait = 0; int gait_cycle = 2000000;//Gait cycle takes 2 seconds int heelstrike_threshold = 3;
In case of heel strike the gait cycle starts Heel strike detection: module of acceleration vector (which has components in x and z axis) higher than threshold. if ((((imu_data->acc.x)^2 + (imu_data->acc.z)^2)^0.5) > heelstrike_threshold){ t_gait = 0; Between 10% and 60% of the gait cycle, actuation voltage is 0V } else if (t_gait>(0.1*gait_cycle) && t_gait<=(0.6*gait_cycle)){ control voltage 0V mra_data.v_ctl=0; More than 60% of the gait cycle, set actuation voltage to 4V. } else if (t_gait>(0.6*gait_cycle) && t_gait<(0.8*gait_cycle)){ mra_data.v_ctl=4000; }
}
/* Calculate the control signal
void control_byKneeAngle(&ang_data,&mra_data){ if((ang_data->velocity)>0){ mra_data.v_ctl = 4000; }
if((ang_data->ang -ANG_MAX)< 0.1) mra_data.v_ctl = 6000; } [brief description]
[long description]
| time_global | [description] |
| imu_data | [description] |
| mra_data | [description] |
| enc_data | [description] |
create a dimmer.
Definition at line 58 of file control.c.
References MRA_DATA_STRUCT::v_ctl, and V_CTRL_MAX.
 1.8.6
1.8.6

